近日,biwn必赢王吉壮/李丹团队与香港大学唐晋尧团队合作,在国际权威期刊《Science Advances》(影响因子14.957)上发表了题为“Self-driven magnetorobots for recyclable and scalable micro/nanoplastic removal from nonmarine waters”的原创性研究成果(图1)。

图1 论文截图:自驱动微机器人用于水体中微塑料去除
近年来,微塑料污染已成为全球陆地和海洋生态系统的巨大威胁,去除这些微纳米大小的塑料颗粒,具有极大的困难。传统的处理方法难以实现,人类急需开发新型高效的处理技术来解决微塑料的污染问题。微纳机器人又称人工活性胶体,是一类能够转化环境中存在的化学及声、光、电、磁、热等能量,在微纳尺度上实现可控运动的智能仿生胶体粒子。利用微纳机器人进行可控动态,实现微塑料去除,为环境保护开辟一条新的途径。
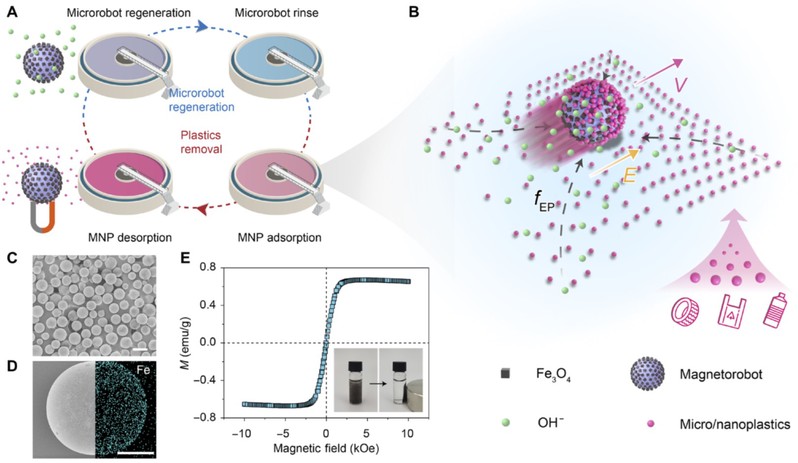
图2. (A)基于自驱动微机器人(SMR)的微纳米塑料(MNPs)去除流程示意图;(B)自驱动SMR动态吸附MNPs的原理图。(C-E)SMR的结构表征和磁滞回线。
本工作中,研究人员设计了一种基于离子交换获得自驱动力的微机器人(SMR),用于去除水体中的微塑料和纳米塑料。SMR由超顺磁性Fe3O4纳米粒子功能化的离子交换树脂微球组成(图2),利用与环境中杂质离子交换的能量实现自驱动,无需额外能量输入,同时扩散泳引起的长程电渗流大大提高了微塑料的吸附范围,从而实现了水体中微纳米塑料的高效吸附去除。
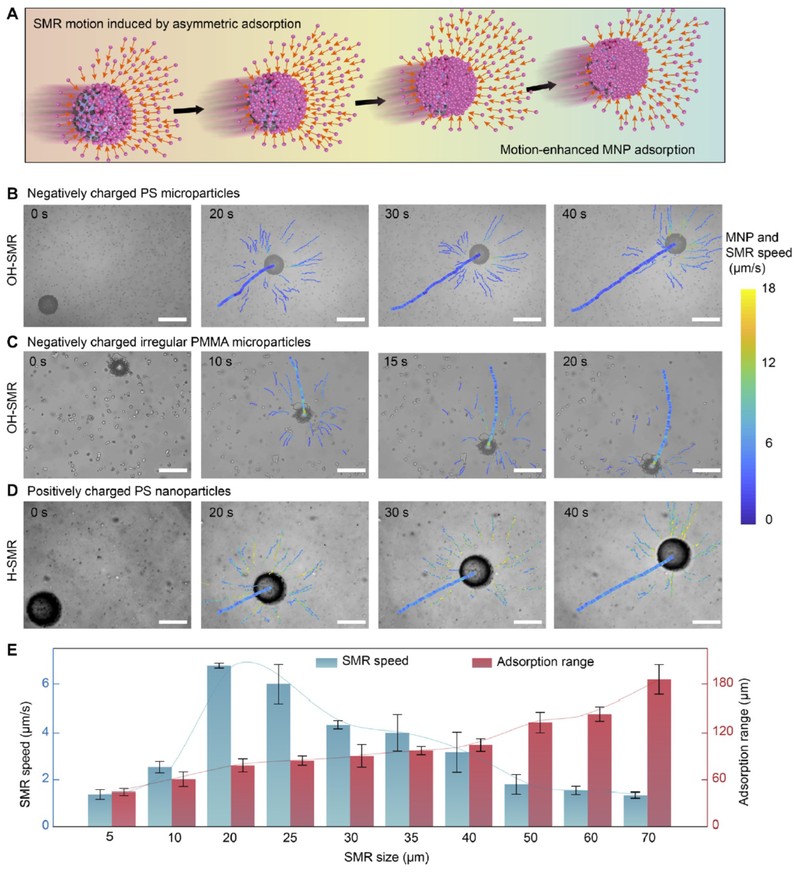
图3. (A)SMR动态去除MNPs示意图。(B-D)SMR动态去除MNPs的运动轨迹,彩色标尺代表瞬时速度。(E)SMR运动速度、吸附范围与SMR尺寸的关系图。
SMR的自主运动是由最初的非均匀微塑料粒子吸附引起的不对称流场实现驱动,因此无需设计非对称结构,大大降低了SMR的制备成本。同时长程吸附能够大大拓展动态吸附范围(图3),从而提高了吸附去除的效率。本工作设计的SMR可广泛适用于不同的成分、大小和形状的微塑料颗粒以及各类非海洋水体中微塑料的去除。材料具有非常高的循环稳定性,在100次循环处理中显示了超过90%的可持续去除效率。
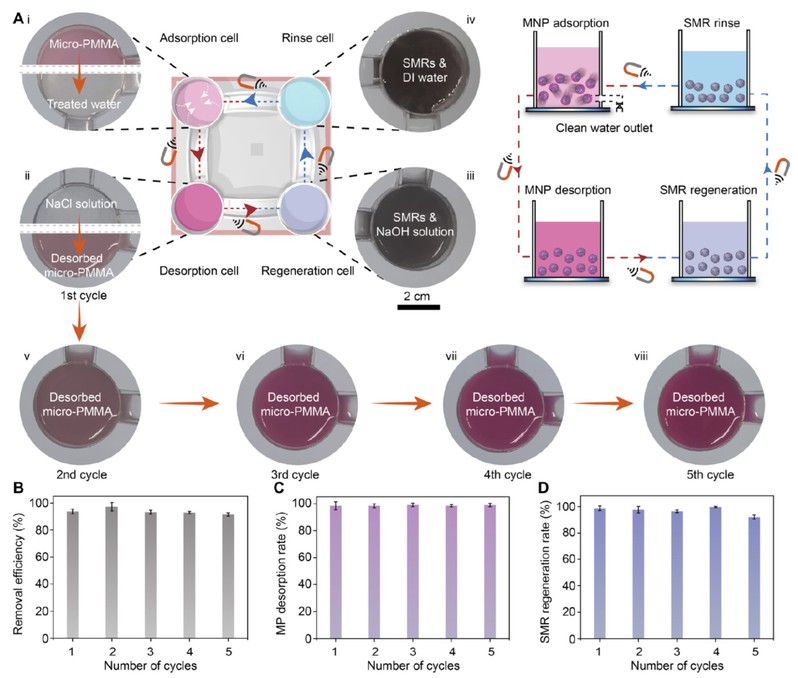
图4. SMR(A)闭环微型工厂的示意图和实际循环实验图片;(B-D)微型工厂五次循环后MNPs去除率、脱附率和SMR回收率。
本工作所设计的SMR具有工艺放大的可行性,图4是设计的模拟微型工厂,循环处理流程包括MNPs吸附池、MNPs脱附池、SMR再生池和SMR清洗池,SMR可通过磁铁进行收集和转移,并且可以与现有的污水处理工艺直接耦合,仅需增加正常污水处理成本的1.5%,具有极大的工业应用潜力(图4A)。在这个微型装置中,微塑料污染水可持续进入吸附池被SMR吸附,然后在脱附池进行微塑料的洗脱和富集。
在未来的实际工业应用,可设计通过电磁铁进行SMR的收集与转移,通过可编程自动化控制系统,可促进整个处理流程的优化。本工作设计的基于微纳机器人的动态吸附技术具有结构简单可大规模制备、成本低、无需化学驱动“燃料”输入、及可工艺放大等优势,为工业化去除、分离微纳米塑料提供了一个极具应用潜力的全新策略。
论文发表后,即被Cell出版社Cell Reports Physical Science期刊选为Outstanding Papers(杰出论文)在编辑部讨论,给论文作者发出邀稿函,并发推文推介(图5)。
图5. Cell Reports Physical Science 期刊推文
本论文第一作者为暨南大学硕士生李万元、香港大学吴昌进博士和熊泽博士,通讯作者为暨南大学王吉壮副教授、李丹教授和香港大学唐晋尧教授。该论文得到了国家自然科学基金重点项目、国家自然科学基金面上项目和青年基金、广东省重大基础与应用基础计划等项目的大力支持。
原文链接:DOI: 10.1126/sciadv.ade1731
